Meet CBI fellow Vivek Thangavelu: Creating technology for the environment
Vivek Thangavelu
Jul 27, 2023

I am excited to join Prof. Aaron Johnson's Robomechanics lab as a CBI postdoctoral fellow this fall. I will be working with his lab on autonomous multi-robot systems for environmental monitoring.
Soil pollution is a major environmental concern as it poses many health and ecology risks. Large amounts of natural gas, petroleum hydrocarbons, heavy metals, and other potential toxic elements (PTEs) have been discharged into soils over the past few decades as a result of unfettered industrial activity and widespread economic growth. These excessive soil contaminants pose a severe threat to human and animal health by entering the food chain and migrating into drinking water sources.
Soil contamination gradients are complicated to model and depend on a wide range of parameters, such as humidity, temperature, soil compaction, altitude, and slope gradient, as well as hidden parameters that may be inferred from hyperspectral images of vegetation and other soil contaminants. We hope to develop a soil contaminant prediction model that serves as a prior to help find the next sampling point.
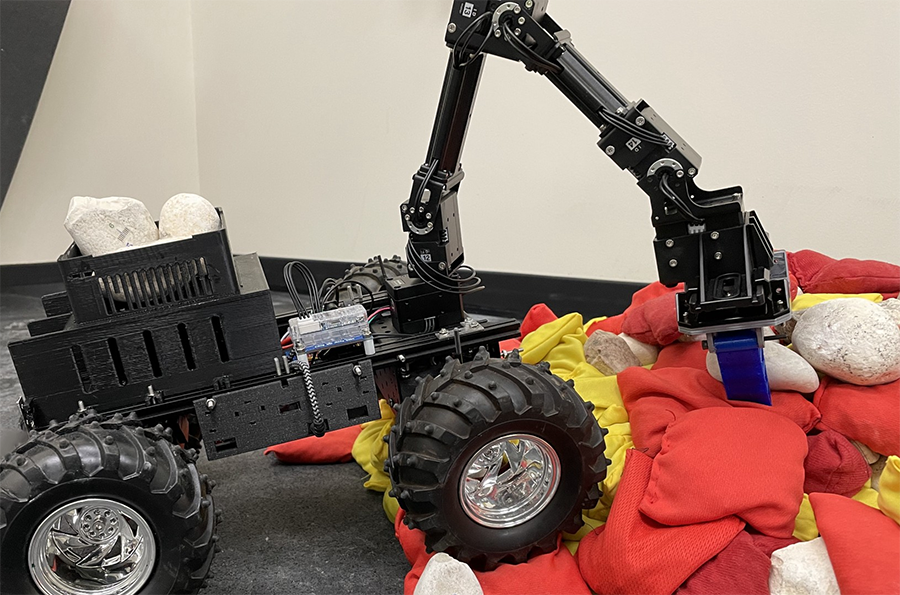
Robot working with found stones
To make measurements, we are using robots that will be equipped with onboard sensors, such as portable X-Ray fluorescence analysers (PXRF), which are hand-held instruments that are capable of in situ multi-element analysis outside the confines of a laboratory.
However, they require some level of ground preparation and careful placement before making sensor measurements. This may involve removing a few layers of topsoil or even digging deep trenches in the ground. A semantic environmental model will allow the robots to make high-level decisions, such as moving obstacles like stones or debris before sensing; this would allow the system to be truly autonomous across a wide variety of environmental conditions. The environmental model can also be extended to the remediation phase.

Experiment setup where a team of heterogeneous robots is tasked to build an access ramp to the inaccessible green platform using foam blocks and compliant bags
Utilizing autonomous robotic systems in contaminated and unstructured environments poses many practical challenges, such as modeling unstructured environments, manipulating terrain, navigating on challenging environments, utilizing new types of sophisticated sensors, and doing all of these autonomously for long term operations. The Robomechanics lab has been working for years on various projects that aim to get robots out of the lab and into such challenging, real-world environments.
My doctoral research focused on the use of in-situ material for multi-robot construction systems in unstructured environments. I also had the opportunity to collaborate with JPL on the DARPA SubT challenge where my efforts focused on coordination in multi-robot systems in unstructured environments. Carnegie Mellon University (CMU) has an institutional history of advancing robotic technologies for decades. I plan to obtain a research faculty position in the future, and a postdoctoral position at CMU will help me achieve that dream. Furthermore, the CBI fellowship grants me the freedom and flexibility to network and work with different labs at CMU, research labs outside of CMU, and industrial partners such as Bosch.